


特殊仕様もご相談ください
サイズ・形状などお客様の状況に合わせた特殊仕様製品も対応しております。お気軽にご相談ください。
多彩な機能と豊富な組み合わせバリエーションの直交ロボット
直交ロボット『JC-3シリーズ』は、多彩な機能と使い易いシステム内蔵の専用コントローラと、豊富なストロークサイズを持つ各軸を組み合わせたロボット本体をセットにしたシリーズです。
卓上ロボットのように設置セッティングが容易であり、面倒な設定がいらないティーチングペンダントを用いた対話式の簡単ティーチングが可能です。
ねじ締め作業用・塗布作業用に適した様々な便利機能を組み込んだ専用ソフトを用意していますので塗布用途・ねじ締め用途でご使用の場合、設定時間を大幅に短縮することが可能です。また、汎用性の高い標準用ソフトも用意しております。
豊富なインターフェースを有し、外部装置との接続が容易に行えます。
簡易PLC機能を内蔵しているので、簡単な信号のやり取りはPLCが不要です。
X軸・Y軸にフィードバック制御のステッピングモータを使用。最大可搬質量8㎏、最大加速度5000㎜/s2、最高速度800㎜/sを実現しました。
LAN(Ethernet)ポート、3つのCOM(RS232C)ポートを標準装備。オプションでフィールドバスを搭載可能です(各種規格に対応。詳細はお問い合わせください)。
PLCからプログラム番号を指定し動作させることはもちろん、座標を指定し移動させることや、プログラムの座標を書き換える事も可能です。
ますます微細化する製造作業に合わせ、カメラ機能を強化しました。
従来からの便利な位置補正機能に加え、自動キャリブレーション機能やカウンタ付CCDカメラ補正機能などの機能を追加しました。
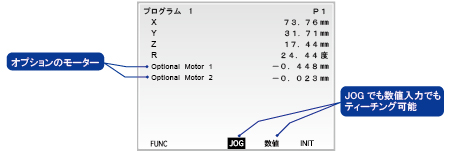
ステッピングモータやサーボモータなど「パルス列入力タイプ」の装置2個までを、ロボットの軸を扱うのと同じようにティーチングペンダント上でティーチングできます。「ターンテーブルを設置し、ワークの向きを変える」「コンベアを設置し、ロボットから制御する」など使い道はさまざまです。
専用のシステムソフトウェアによって、「ねじ締め作業」でも「塗布作業」でもティーチングが簡単。PCソフトウェア「JR C-PointsⅡ」を使えばDXFファイルやガーバーデータなどをもとに、ティーチングデータを作成することが可能です。
ジョグ動作でティーチングを行えるティーチングペンダント(オプション)も用意しました。
海外でもより多くのスタッフが利用できるように、ティーチングペンダントの表示言語は日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、韓国語、中国語(簡体字・繁体字)・チェコ語・ベトナム語の11言語から選択可能です。
現在位置を記憶しているため、原点復帰による干渉の心配がありません。
*1 アブソリュート仕様は3軸機のみとなります。
アプリケーション別の専用ソフトなので初心者でも簡単ティーチングが行えるほか、コマンド群をさらに充実させ、多彩なコマンドを使用することも可能です。
ビジョンシステムを用いて位置補正を行いたい場合、今まで手間のかかっていた、カメラのキャリブレーション(カメラの座標をロボット座標に変換)が、カメラ側のキャリブレーションマーク登録を行えば、あとは自動で行えるようになりました。
お使いいただけるカメラ*2
[メーカー] Panasonic (型式)A110・A210、PV200・PV260・PV300・PV500
[メーカー] Keyence (型式)CV3000、CV-X100・CV-X200・CV-X400、XG-8000・XG-Xシリーズ
[メーカー] OMRON (型式)FHシリーズ、FQシリーズ
*2 生産が終了している場合もございます。詳細はメーカーにお問い合わせ願います。
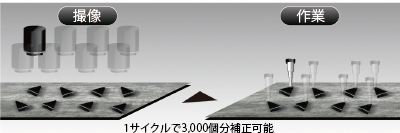
カメラで位置補正を行いながら作業をする機能を強化。ロボットに最大3,000個の補正値を取り込めるので、パレット上に並べられたワークピースに作業を行う場合、「撮像」→「作業」→「次のワークピースの撮像」→「次のワークピースへの作業」・・・、の繰り返しではなく、「連続して撮像」→「連続して作業」が可能となり、作業時間短縮に大変有効です。
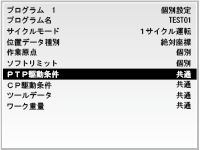
全てのプログラムに同一設定を行うことの多い「作業原点」「ソフトリミット」「PTP駆動条件」などの項目で共通設定が行えるようになりました。設定を一回行うだけでよいので、ティーチング時間の短縮や条件見直し時に役立ちます。もちろん、任意に個別設定に切り替えることもできます。
塗布機でノズル先端位置を記憶しておくことで、ノズル交換やシリンジ交換でノズル先端に位置ズレが生じた場合、そのズレ量を検出・補正し、交換前と同じように塗布が行える「ニードルアジャスタ機能」が、従来の3軸機に加え、4軸機でも行えるようになりました。シリンジ交換時のノズル位置の調整に手間取っている場合は是非ご利用ください。

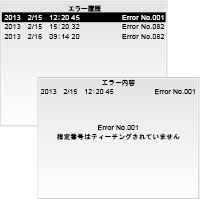
エラーの発生日時が表示可能になりました。
発生時間の特定も出来ますので、エラー原因の解析にも役立ちます。
エラー履歴は、直近の1,000件分保持できます。
ロボットの機能とは独立して動作する簡易PLCを内蔵しているので、外部機器との簡単なやり取りであれば別途購入する必要はありません。
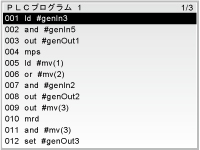
ポイント作業データでよく使う命令列を登録したり、お客様独自の専用ソフトを作成することも可能です。
PCソフト『JR C-PointsⅡ』は、ティーチングデータやカスタマイズデータの作成・編集・保存をパソコン上で行えるジャノメオリジナルのプログラム入力システムです。
表計算ソフトのようにポイントデータのコピー&ペーストを行えたり、数値入力によるポイント設定や、ポイント作業命令の作成・編集が難なく行えます。 また、「ポイントグラフィック編集機能」で経路データを図形としてグラフィカルに作成・編集が可能になり、更に便利になりました。
「JR C-Points」のティーチングデータを、「JP C-PointsⅡ」用データに変換してお使いいただけます。
①プログラムエリア
プログラミングデータは、直接数値を入力、編集することも可能。
②基本操作エリア
アイコンを用いて、簡単にプログラミングの作成が可能。
③カメラ映像表示エリア※USBカメラ接続時
クリックした位置が画面の中央になるようにロボットが移動。
④ロボット操作エリア
操作アイコンを用いてジョグ操作が可能。
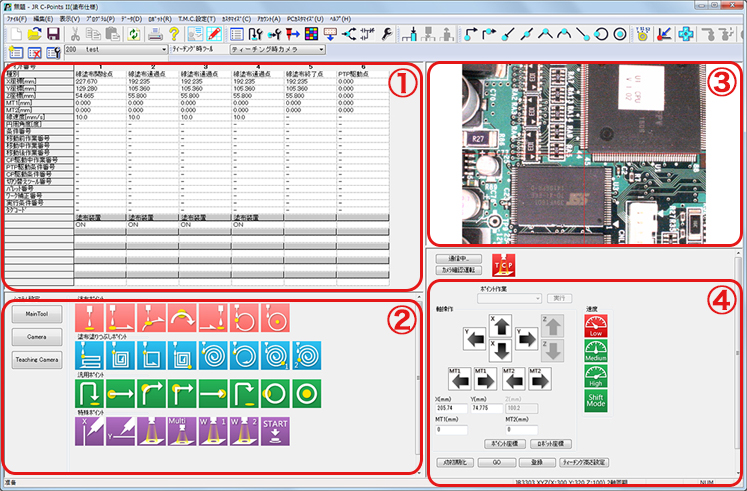
市販のUSBカメラ*を接続することにより、PC上の拡大映像よりポイントを指定、アイコンを選ぶだけで簡単、正確なティーチングが可能です。
(*対応可能なUSBカメラについてはお問い合わせ下さい。)
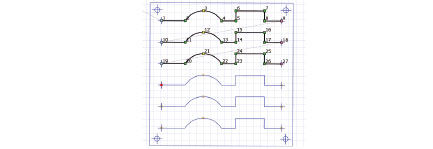
DXFデータをもとにポイントを設定すれば位置データが正確
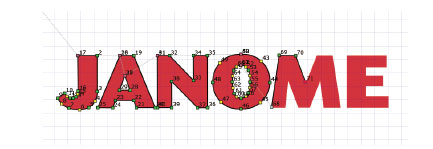
JPEG画像を参考にポイント設定
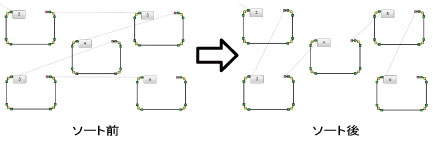
ポイント間の移動距離が大きいので「左から順」でソート
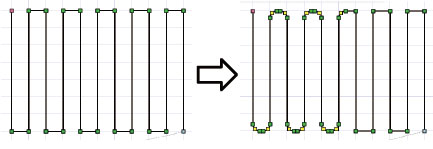
連結点をクリックし、Rの半径を指定
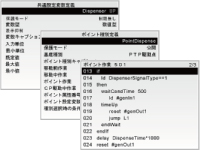
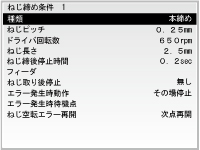
ねじ締め、塗布の専用ソフトを取り揃えています。
ねじピッチ・長さ、ドライバー回転数などのねじ締め条件を作業位置に設定するだけで、簡単に作業プログラムを作成できます。
点塗布、線塗布などのさまざまな塗布条件を作業位置に設定するだけで、簡単に作業プログラムを作成できます。
