特殊仕様もご相談ください
サイズ・形状などお客様の状況に合わせた特殊仕様製品も対応しております。お気軽にご相談ください。
全ての設定を1つのソフトで簡単に
カメラ・センサーを取り付けた塗布用卓上ロボット
精密塗布を必要とするワークに対応するため、剛性・精度の高いJR3000シリーズと、マシンビジョンに最適なカメラ・レーザー変位計・ニードルアジャスタとを合わせ、1つのパッケージにしました。
これまで煩雑だったカメラのキャリブレーションやセンサーの設定、ティーチングまでを、1つのPCソフトで誰でも簡単に行えるようにしました。
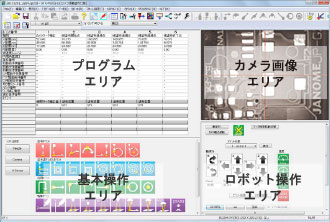
PC画面は「プログラムエリア」「カメラ画像エリア」「基本操作エリア」「ロボット操作エリア」を一画面に集約した明瞭なインターフェースで、誰でも簡単に操作ができます。
これら3種類の補正機能で常に安定した塗布を実現します。
キャリブレーションやセンサーの設定などの初期設定から、補正プログラムの作成やモニター映像での位置設定など、すべての設定がPCソフト上でできるカメラ搭載塗布仕様専用のソフトウェアです。
・プログラムエリア
ポイント別のプログラミングデータを表示。直接選択して、値を編集することも可能。
・基本操作エリア
プログラミングはアイコン選択方式で、誰でも簡単にプログラミングが可能。
・カメラ画像エリア
拡大したカメラ画像で精密な位置指定が可能。カメラ画像をクリックすると、その位置が画像の中心になるようにロボットが動作。
・ロボット操作エリア
カメラ画像を見ながらジョグ操作。
捨て打ちした跡をカメラで写すだけで自動キャリブレーションを行います。
(十字マークでニードル位置を合わせ、カメラで撮影する方法もあります。)

ティーチングはJOG操作で移動し、カメラ画像で位置を合わせて作業内容のアイコンを選ぶだけ。誰でも簡単にプログラムできます。

プログラム時によく使われる30種類以上の設定が大きなアイコンになっていて、位置補正も簡単にプログラムできます。

線塗布開始点

点塗布

カメラワーク補正撮影点

Zセンサー線塗布開始点
■カメラ補正
ワークがズレても補正しながら塗布作業。

■連続高さ補正
レーザーセンサーでワークの高さを連続測定。塗布面の高さが変化するワークでも一定のクリアランスで正確に塗布を実現。

■ニードル補正
ノズル交換などでニードル先端が位置ズレしてもニードル先端を自動検出して補正。
