-
共通:
・PCソフトウェア JR C-PointsⅢ (Windows®10 64bit, Windows®11対応)日本語・英語で言語切り替え可能です。
・I/O-SYSコネクタ
・I/O-SYSコード(2m/3m/5m)
・I/O-SYS端子台(0.5m/2m)
・I/O-1コネクタ
・I/O-1コード(2m/3m/5m)
・I/O-1端子台(0.5m/2m)
・I/O-MTコネクタ
・I/O-MTコード(0.5m/1m/3m/5m/10m)
・ENC-INコネクタ
・位置補正カメラAS200
・ニードルアジャスタ
・ケーブルキャリア(標準仕様、塗布仕様のみ)
・ティーチングペンダント(2m/3m/5m)
- 標準
- 非常停止スイッチ付き
- イネーブルスイッチ付き
- モード切り替えスイッチ付き
- 非常停止スイッチ+イネーブルスイッチ付き
- 非常停止スイッチ+モード切替スイッチ付き
- イネーブルスイッチ+モード切替スイッチ付き
- 非常停止スイッチ+イネーブルスイッチ+モード切替スイッチ付き
- 操作部仕様B仕様:
・スイッチボックス(2m/3m/5m)
- 標準
- モード切替スイッチ付き
- オプションスイッチ付き
- モード切替スイッチ+オプションスイッチ付き
JR4000 Series
卓上ロボット JR4000シリーズ
卓上ロボットの可能性をさらに広げた新たなフラッグシップモデル
主な仕様
3軸
※横にスクロールできます
| JR4203 | JR4303 | JR4403 | JR4503 | JR4603 | ||
|---|---|---|---|---|---|---|
| 可動範囲 | X・Y軸 | 200×200mm | 300×320mm | 400×400mm | 510×510mm | 510×620mm |
| Z軸 | 50mm | 100mm | 150mm | |||
| 最大可搬質量 | ワーク | 7kg | 15kg | |||
| ツール | 3.5kg | 7kg | ||||
| 最高速度*1 <PTP駆動> ( )は設定範囲 |
X・Y軸 | 700mm/s (7~700) |
1000mm/s (10~1000) |
|||
| Z軸 | 250mm/s (2.5~250) |
400mm/s (4~400) |
||||
| 最高速度*1 <CP駆動> ( )は設定範囲 |
X・Y・Z軸合成 | 600mm/s (0.1~600) |
850mm/s (0.1~850) |
|||
| 位置繰り返し精度*2 | X軸 | ±0.006mm | ±0.007mm | ±0.008mm | ±0.008mm | |
| Y軸 | ±0.01mm | |||||
| Z軸 | ±0.008mm | |||||
| 外形寸法*3 ( )は両持ちタイプ |
W×D×H ※突起部を除く |
323×389×554mm | 560×535×659mm | 584×630×807mm (615×631×807) |
678×730×807mm | 790×730×807mm |
| 本体質量*3 ( )は両持ちタイプ |
20kg | 36kg | 42kg (45) |
45kg | 46kg | |
4軸
※横にスクロールできます
| JR4204 | JR4304 | JR4404 | JR4504 | JR4604 | ||
|---|---|---|---|---|---|---|
| 可動範囲 | X・Y軸 | 200×200mm | 300×320mm | 400×400mm | 510×510mm | 510×620mm |
| Z軸 | 50mm | 100mm | 150mm | |||
| R軸 | ±360° | |||||
| 最大可搬質量 | ワーク | 7kg | 15kg | |||
| ツール | 3.5kg | 7kg | ||||
| 最高速度*1 <PTP駆動> ( )は設定範囲 |
X・Y軸 | 700mm/s (7~700) |
1000mm/s (10~1000) |
|||
| Z軸 | 250mm/s (2.5~250) |
400mm/s (4~400) |
||||
| R軸 | 600°/s (6~600) |
900°/s (9~900) |
||||
| 最高速度*1 <CP駆動> ( )は設定範囲 |
X・Y・Z軸合成 | 600mm/s (0.1~600) |
850mm/s (0.1~850) |
|||
| 許容慣性モーメント | 65kg・cm² | 90kg・cm² | ||||
| 位置繰り返し精度*2 | X軸 | ±0.006mm | ±0.007mm | ±0.008mm | ||
| Y軸 | ±0.01mm | |||||
| Z軸 | ±0.01mm | |||||
| R軸 | ±0.008° | |||||
| 外形寸法*3 ( )は両持ちタイプ |
W×D×H ※突起部を除く |
323×389×676mm | 560×535×844mm | 584×630×894mm (615×630×894) |
678×730×894mm | 790×730×894mm |
| 本体質量*3 ( )は両持ちタイプ |
22kg | 39kg | 46kg (49) |
49kg | 50kg | |
- *1 最高速度は条件によって変わります。最大可搬質量設定では、最高速度は出ませんのでご注意ください。
- *2 位置繰り返し精度は絶対精度を保証するものではありません。
- *3 オプション仕様の場合、外形寸法・本体質量が変わる場合がございます。詳細はお問い合わせ下さい。
共通仕様
※横にスクロールできます
| 駆動方式 | 5相パルスモータ駆動(オプションでエンコーダ付き) | |
|---|---|---|
| 制御方式 | PTP(Point to Point)制御、CP(Continuous Path)制御 | |
| 補間機能 | 3次元直線補間、3次元円弧補間、スプライン曲線補間 | |
| 位置教示方式 | リモートティーチング(JOG)/数値入力(MDI) | |
| ティーチング形態 | ・ティーチングペンダント(オプション)にて、直接ティーチング ・PCソフト JR C-PointsⅢ(オプション)によるオフラインティーチング。CAD等で作成した図形(DXF、STEP、IGES、DWG、JPEG)を利用可能。 |
|
| 表示言語の切り替え | 日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、韓国語、中国語(簡体字・繁体字)、チェコ語、ベトナム語 | |
| プログラム数 | 999プログラム | |
| ポイント記憶容量 | 最大32,000ポイント*4 | |
| 簡易PLC機能 | 最大100プログラム、最大1,000ステップ/プログラム | |
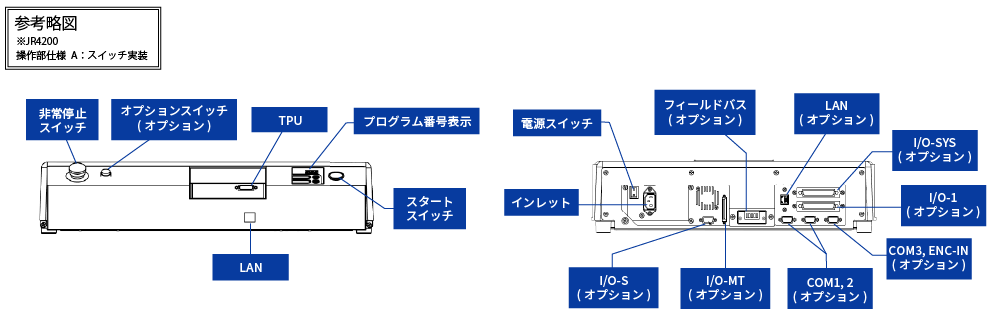
| 外部入出力 | I/O-SYS*5 (オプション) |
入力16点/出力16点 |
| I/O-1*5 (オプション) |
入力16点/出力14点(リレー出力2点を含む) | |
| I/O-S*6 (オプション) |
エリアセンサ等インターロック装置の接続用 ①I/O-S1:標準安全回路 ②I/O-S2:二重化安全回路 | |
| I/O-MT (オプション) |
補助軸(パルス列入力モータ*7)制御用 最大2軸を制御可能 |
|
| フィールドバス (オプション) |
各種規格に対応 (※詳細はお問い合わせください。) | |
| COM1(オプション) | RS-232C、外部機器の制御用、COMコマンド | |
| COM2、COM3*8 (オプション) |
RS-232C、外部機器の制御用 | |
| LAN*9 | Ethernetを介したパソコン接続用 ・制御コマンドによるロボットの制御 ・PCソフト『JR C-Points Ⅲ』(オプション)の接続 (カスタマイズデータやティーチングデータの送受信、システムソフトのバージョンアップ) (オプション:背面ポート) |
|
| ENC-IN*8 (オプション) |
外部エンコーダ値の入力用 | |
| TPU | ティーチングペンダント(オプション)接続専用 | |
| SWITCHBOX*10 | スイッチボックス接続用 | |
| I/O用内蔵電源(オプション) | DC24V定格2.1A | |
| 電源 | AC100-120V/200-240V(単相) 50/60Hz | |
| 消費電力 | 200W | |
| 作業環境 | 周囲温度 | 0~40°C |
| 相対湿度 | 20~90%(結露なきこと) | |
- *4 記憶領域が共有のため、ポイント属性データ、ポイント作業データ、PLCプログラムデータが増えると、ポイントデータ記憶数は減少します。
- *5 I/O極性には「PNP仕様」「NPN仕様」の2種類があります。
- *6 I/O-S2は可動範囲200mmストロークの機種を除く。
- *7 お客様にて制御電源、パルスモーター、モータードライバをご用意ください。
- *8 COM3とENC-INはどちらか一方のみ追加可能です。
- *9 イーサネット接続は10BASE/100BASE-Tとなります。
- *10 操作部B仕様のみ。
- オプション仕様については、ご注文時のみ承ります。
- CEマーキング対応機種もございます。
- 製品改良等のため、予告無く仕様を変更することがあります。
標準付属品
- 共通:電源ケーブル