基板分割ロボット JR3000ERT紹介
JR3000シリーズの基板分割仕様を動画でご紹介
詳しく見る卓上ロボットの可能性をさらに広げた新たなフラッグシップモデル
JR4300以上の機種で、最高速度1000mm/sec、最高加速度3400mm/sec2を実現。
業界トップクラスの速度で、タクトタイムを短縮します。

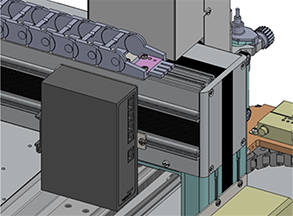
Y軸部の上部・後部に、装置類を取り付けるための溝を用意しました。
配線などをすっきりと纏めることが出来ます。
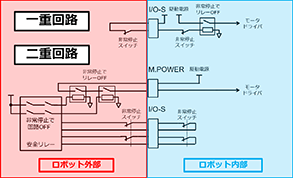
従来の安全カテゴリ1、パフォーマンスレベルPL=cに対応した安全回路構築仕様に加え、危険な作業、危険な設備に対応するために、安全回路(モータ電源遮断リレーを含む)を外部に構築するための仕様を選択可能(オプション)。安全カテゴリ3、パフォーマンスレベルPL=dへの対応が可能になりました。
ステッピングモータやサーボモータなど「パルス列入力タイプ」の装置2個までを接続可能。
二種類の制御モード+エンコーダ入力機能で、多彩な用途に対応します。
①ポイントモード ロボットのX・Y・Z・R軸と連動した動作。
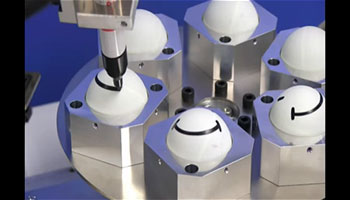
『事例 - 4軸塗布機を6軸に』
シリンジの角度とワークの角度を変えるために軸をそれぞれに付加し、筒状のワークの外周に空けた穴の側面でも角度を設定して塗布を行えます。
②独立モード ロボットのX・Y・Z軸とは独立した動作。
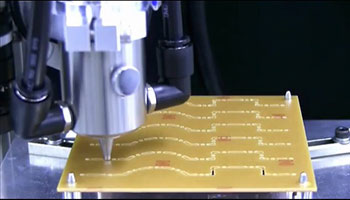
『事例 - コンベアを流しながらロボットで作業』
ポイントの座標・動作とは独立するため、コンベアを流しながら、ロボットで塗布やねじ締めといった作業を行えます。
③エンコーダ入力 外部からエンコーダ値を取得することで、回転量を監視、判定制御を行えます。
位置補正カメラAS200(オプション)により、ワークがずれても位置を補正し、正確な作業を行うことができます。
ロボットもカメラも当社PCソフト「JR C-PointsⅢ」のみで簡単に設定できるため、カメラ専用ソフトを使う必要はありません。

従来機種から使用可能な信号制御、ポイント作業によるデータのやり取りの他、指定種類のデータを常時出力する「フィールドバス レジスタ出力機能」が追加されました。
これにより、複雑な設定を行わなくとも、いつでもPLCから必要なデータを取り出すことができます。
プリセットのポイント種別に含まれない作業も、ポイント作業で自由にプログラミング。
使用可能なコマンドやビルトイン関数が従来機種に比べて増加し、カスタマイズ可能な機能も拡充されました。
PCソフト『JR C-PointsⅢ』は、ティーチングデータやカスタマイズデータの作成・編集・保存をパソコン上で行えるジャノメのオリジナル対話式プログラム入力システムです。
動作ポイントの座標をグラフィカルに表示することで、直感的にプログラムの内容を把握することが可能になり、CADデータからの座標変換にも対応しています。また設定パラメータもツリー表示で便利に確認・編集ができるようになりました。
「JR C-PointsII」のティーチングデータを、「JP C-PointsⅢ」用データに変換してお使いいただけます。
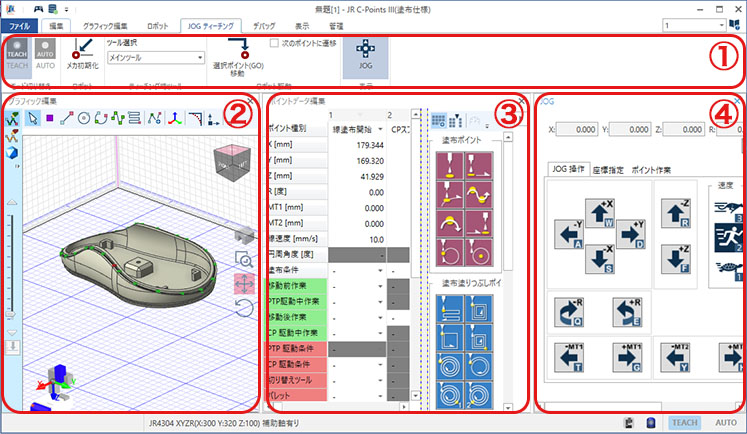
①リボンコントロール
各タブをクリックすると、機能ボタンや設定項目が表示されます。
②グラフィック編集ビュー
3D表示に対応したグラフィック編集エリア。3Dビューを使用して、視覚的にティーチングすることができます。
③ポイントデータ編集ビュー
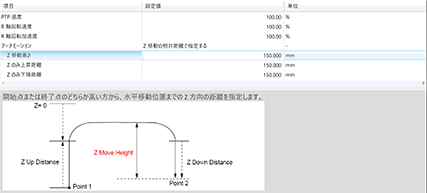
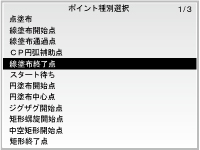
選択したポイントデータ列に対して、ポイント種別や座標位置、ポイント作業などの要素を直接編集することができます。
④JOGビュー
JR4000本体に接続することで、PCから直接JOG動作を行うことができます。
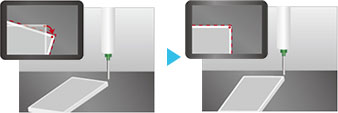
3DCADの読み込みに対応、読み込んだデータからティーチングポイントを自動生成することで、ティーチング工数を大幅短縮。
新たなポイント種別「スプライン曲線駆動」を実装し、複雑なワーク形状にも対応可能です。
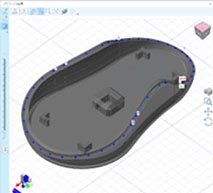
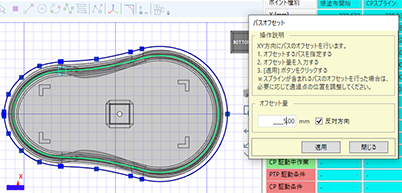
ポイント座標は、グラフィック上で簡単にオフセットや拡大・縮小が可能。
実機に合わせて座標を調節するのも、簡単操作で行えます。
PCソフト上に表示される「クイックガイド」により、項目や機能を選択すると、それに対する説明が表示されます。機能内容を確認するのに取扱説明書を用意する必要はありません。
通常のPCとタブレットPCで、ユーザーインターフェースを切り替えて使用可能。
環境が違っても快適に作業できます。

※タブレットPCをご利用の際は、安全の為、セーフティコマンダーをご使用ください。
※セーフティコマンダーはIDEC株式会社の商標または登録商標です。
複数の機体で同じ作業を行う場合に、座標データに機体毎の個体差を適用して、書き込んだ機体に合った座標に変換する機能です。微調整に必要な工数を省き、水平展開の効率を向上させます。
管理者権限のあるWindowsアカウントからパスワードを設定し、その他アカウントからのデータ保存や書き込みをロックすることができます。
ねじ締め、塗布の専用ソフトを取り揃えています。
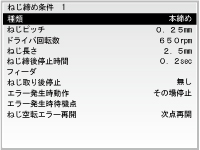
ねじピッチ・長さ、ドライバー回転数などのねじ締め条件を作業位置に設定するだけで、簡単に作業プログラムを作成できます。
アプリケーション例

ねじ締めユニット、ねじ供給機を取り付けた例
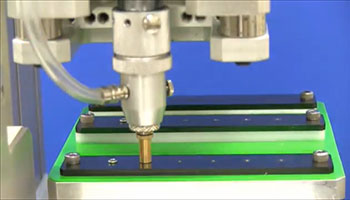
点塗布、線塗布などのさまざまな塗布条件を作業位置に設定するだけで、簡単に作業プログラムを作成できます。
アプリケーション例

ディスペンスユニットを取り付けた例